世界中の300以上の大学と研究機関が、ロボット工学や人工知能に関する研究及び、
コンピュータサイエンスやもの作り、数学の授業でNAOを使用しています。
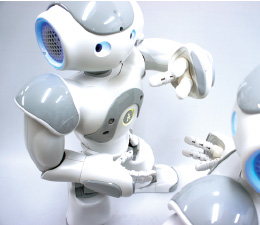
ALDEBARAN Robotics社が開発・生産しているNAOは、研究や教育活動において最も広く使用されている人型ロボットです。
自立的でありながらプログラム可能なNAOは初心者から上級者まで広範囲のユーザーの使用に適しています。
ALDEBARAN Robotics社が開発したソフトウェア「CHAOREGRAPHE」によってユーザーはロボットの動作と対話シナリオを簡単に作成して編集することができます。

ALDEBARAN Robotics社はNAOという先進的なハードウェアとソフトウェアを持ったプラットホームを開発したのみでなく、
ユーザー同士のコミュニティも生み出しました。開発者、研究者、そして教育者の方々は知識の共有や未来のヒューマノイドロボット開発のために
NAOのユーザーコミュニティに参加することができます。

NAOはロボット工学や、ロボットが人を支援するためのフィールドでの研究、教育活動、及びヒューマン・ロボット・インタラクションの研究に適したプラットホームです。
NAOのオープンかつ自由にプログラムできるアーキテクチャにより、新たなアプリケーションを発見できます。
NAOを使用するメリット
- 概念的および理論的モデルの最適なテストプラットフォーム。
- 個人支援または監視など、ロボットベースの研究に関する実地実験用の自律制御型プラットホーム。
- 弊社のソフトウェアスイートを使って簡単にプログラミングしたり、研究を行うことが可能。
- 理論と実践を結び付ける実地体験により、コンピュータサイエンス、機械工学、電子工学、制御工学など、
ロボティクスに関連するさまざまな分野の見解を深めることが可能。
- 技術的作業に対する高い動機付けとなり、関心を持つことが可能。たとえば、物体を把握するための制御についての勉強をしたり、
NAOを動作させるためにマトリクスや胴体の演算を行うことは、学生にとっては刺激的なプロジェクトです。
- チームワーク、プロジェクト管理能力、問題解決能力、コミュニケーションスキルを育成可能。
動画
NAOとは?

NAOは最新技術が集められたプラットフォームの為、研究者は簡単に動かすことができ、研究テーマの中核部分に集中することができます。
さらにNAOは豊富なドキュメントを幅広いレベルのユーザーに対応できる複数の研究プラットフォームを提供しています。
NAOの優れた設計により、容易な開発で有用な動作を得ることができます。

機械工学/電子工学
初級レベルでは、NAO CADファイルを使用して基本的な機械部品を再設計したり、
トルク計算やセンサーの研究を行うことができます。
上級レベルでは、数学的スキルを用いてマトリクス演算を行い、
NAOのキネマティクスに関する研究を行うことができます。

子供との対話
米ノートルダム大学のJoushua Dishi教授はコミュニケーションに障害を持つ子供との対話に、
身振りや顔の表情といった様々なコミュニケーション動作を研究するためにNAOをしようしています。

ロボカップ
1997年にIBMのDeep Blueはチェスで人間の世界王者を倒しました。人工知能とロボット工学の次の大きなステップとして、
ロボット工学の次の大きなステップとして、ロボカップは50年以内にロボットと人間のワールドカップ王者との試合を開催します。
NAOはロボカップにおける標準プラットフォームリーグの公式プラットフォームです。

ヒューマン・マシンインタラクション
欧州のALIZ-Eプロジェクトでは、病院におけるロボットと子供たちとの長期的なインタラクションを観察するために科学者、
医師、心理学者等によってNAOが使用されています。
高度なオーディオ/ビジュアル機能
HDカメラ
カメラセンサーの性能向上により、VGAでの感度を高めることができ、優れた低光量性能が実現されています。
ロボットのCPUの最大画像処理能力は、HD解像度で最大30画像/秒です。
NAOは頭部を水平方向に239°、垂直方向に68°回転することができ、カメラの視野覚は水平方向61度、
垂直方向47度で、非常に優れた周囲環境検知能力を備えています。
物体認識
NAOは多数の物体のを認識することができます。Choregrapheソフトウェアの優れた性能により、いったん物体情報が保存されると、
NAOは再度その物体を見たときに、それを認識してそれが何であるかを伝えることができます。
顔検出及び認識
NAOはインタラクションの最もよく知られている機能の一つである、顔を検出して学習し、次回それを認識することができる機能を備えています。
音声合成
NAOは19か国語を話すことができます。Choregrapheの「say box」にテキストを挿入して、必要に応じて音声パラメータを変更することができ、
正しい句読法およびイントネーションでテキストを正しく発生します。
自動音声認識
音声認識は人とロボットの直感的なインタラクションの核となる機能です。
強力かつ安定した音声認識を開発するのに最高の技術パートナーであるNuanceを選んだのはこのためです。
NAOは、2メートル離れた場所から会話を聞き取ることができ、完全な文章、場合により文章中の数個の単語を認識することができます。
このため、より流暢で自然な会話を行うことができます。
音の検出と位置特定
頭部の全周に装備されたマイクにより、NAOは人間と同様に周囲の音を検出して位置を特定することができます。
自然な反射動作
インテリジェントなスティネス
ロボット動作時に、モーターが必要とする電力を自動的に調整する独自の機能です。
これにより、ドライブコンポーネントが効率的に使用され、バッテリの電力を節約することができます。
転倒マネジャ
NAOは転倒することもありますが、一人で起き上がる方法も習得しています。
また、さらに高度な機能として、地面に倒れ込む前に自らを腕で守る転倒検出システムが搭載されています。
自己衝突防止機能
この機能は、NAOの腕が身体の他の部分とぶつかるのを防止する機能です。
NAOは、頭部、胴体、脚、腕の位置を常に把握していて、意図せず手足がぶつからないように動作します。
リソースマネージャ
NAOの最大の特長は、複数の命令を組み合わせたり順序付けできることです。
新たに要求された動作を実行する前に、実行中の動作を中断/停止または調整することができます。
Intel Atom CPU搭載
最大自由度25°
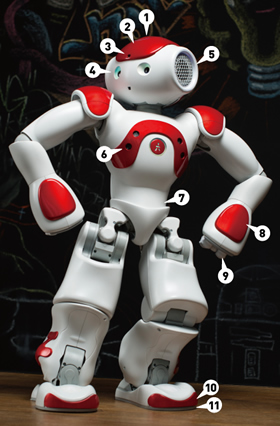
- ①触角センサー
- ②マイク
- ③HDカメラ
- ④赤外線センサー
- ⑤スピーカ
- ⑥超音波センサー
- ⑦慣性ユニット
- ⑧触覚センサー
- ⑨把握動作が可能な手
- ⑩バンパー
- ⑪感圧抵抗体センサー
ビジュアルプログラミングソフトウェア
ユーザーフレンドリーなソフトウェア「CHOREGRAPHE」を使用すれば、簡単にNAOのプログラムを作成できます。
「CHOREGRAPHE」ではあらかじめ用意された「動作ボックス」を使用して制御フロー図を描くことで、
イベントドリブン、シーケンス、および並列的なプログラミングが可能です。
用意されている動作ボックスは簡単にコンフィグレーションを変更できます。
またタイムラインで動作を編集したり、「Python」のスクリプトを書くことによって独自の動作ボックスを作成することができます。
3D物理シミュレータ
3Dシミュレーションエンジンにより、開発したプログラムを、仮想のNAOでテストすることができます。
実際のNAOを使用する必要はありません。これにより、仮想環境と現実環境の違いについて研究することができます。
ユーザー定義の物体を挿入および変更することで、シミュレーションの作業空間を変更できます。
NAOのデータベース
MONITORを使用すると、NAOのセンサーおよび関節部のすべてのデータを簡単に測定してグラフ化できます。
たとえば、関節部に送信された角度コマンドとセンサー位置をグラフ化することで、
閉ループ制御を表すことができます。
ロボティクスに関連付けられている各種規律の基本的な概念を、学生が理解できるようにすることも重要です。
TELEPATHE
「TELEPATHE」はユーザーの皆様が、NAOの視界やセンサー情報を確認するためのデスクトップアプリケーションです。
Cameraモジュールを使えば、カメラからのデータを受け取ることができます。
またMemoryモジュールを使えば、ロボットのセンサーに簡単な方法でアクセスすることができます。
また「TELEPATHE」では、保存されたデータを使用して画像認識アルゴリズムをテストできます。
ソフトウェア開発キット
NAOの「SDK」は分かりやすく、また文書化されており、ユーザーの皆様が作ったプログラムモジュールをロボットに組み込むことで、
NAOの動作を取り組むことができます。
NAOの「SDK」は、C++、Pythonで開発されているURBIや.NETなど、多くのロボット開発プラットフォームや開発言語と互換性があります。
各種プラットフォーム/言語に対応-WINDOWS、LINUX、MAC-C++、PYTHON、JAVA、MATLAB、.NET、URBI